- 首页
- >
- 资源
- >
- 机车车辆受电弓CCTV智能分析系统
- >
机车车辆受电弓CCTV智能分析系统
2022-07-02 09:41一、概述
受国铁集团机车部对受电弓视频监控系统智能分析的安排,对现有受电弓视频监控系统进行智能分析安装需求,识别受电弓机械结构异常、电气故障等问题,并协助机械师判断受电弓故障。
通过对现有车辆的故障模式和车辆保护逻辑的分析,主要针对汽车自身无法检测到的受电弓故障,如受电弓倾斜、受电弓结构变形等。此类故障在运行和运行过程中不易识别。导致更严重的后果。受电弓视频监控系统的智能分析功能,可以对受电弓视频监控图像进行分析,识别受电弓故障并做出报警提示,协助机械师判断并采取有效措施,避免更重大的危害发生。
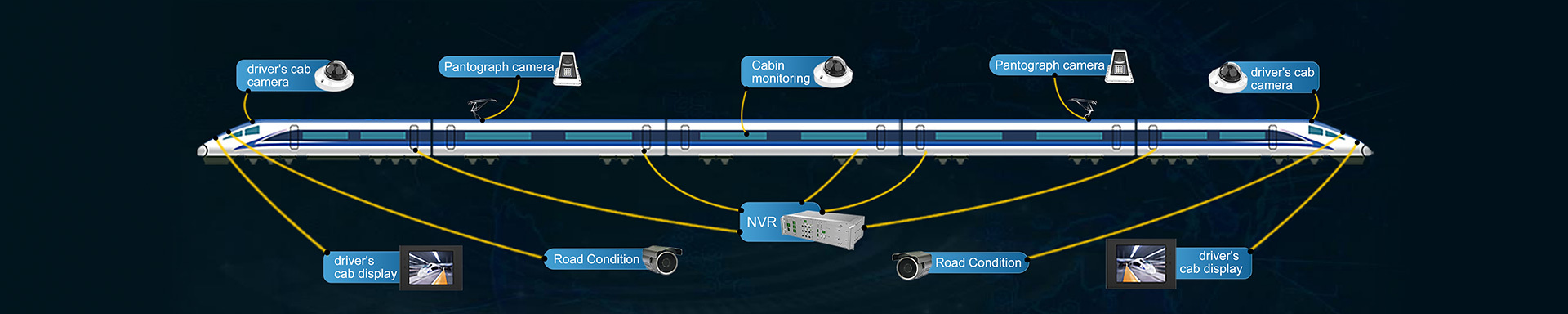
2. 受电弓CCTV系统组成
受电弓闭路电视系统用于在运行过程中实时监控列车车顶受电弓和联络网的运行状态。智能分析功能在原有的视频监控系统中加入智能识别技术,实现受电弓异常情况的自动实时识别。保存列车运行过程中受电弓工作状态视频和受电弓结构异常图片,为随行机械师处理弓网异常故障提供补充监控视频和分析图像。
机车车辆受电弓CCTV系统智能分析功能由以下主要部分组成:受电弓视频监控服务器、智能分析主机、受电弓摄像机、监控屏。
三、受电弓闭路电视系统智能分析功能的应用情况
受电弓视频监控系统的智能分析功能主要识别车辆运行过程中的受电弓故障。对于严重的受电弓故障,例如管道破裂和碳撬脱落,受电弓将自动下降,无需机械师进一步判断和操作。
该智能分析功能对不易直接检测到的弓形异常进行预警,如受电弓倾斜、受电弓结构变形等影响最严重的弓形结构异常,优先识别。
结合机车车辆高压系统受电弓故障的技术项目分析,确定了受电弓视频监控系统智能分析功能辅助机械师判断的应用项目如下。
1、受电弓在运行过程中倾斜。此时,受电弓导管不会断裂,也不会自动降弓。如果不报警,倾斜的受电弓可能会被触网拉动或被其他异物击倒,造成严重的二次损坏,因此需要在此工况下进行故障识别和报警。
2、受电弓操作过程中发生结构变形;结构变形的类型包括风管未破裂时的缺弓角和弓形结构的弯曲变形等。报警失败可能会导致钻弓等问题,因此需要针对这种情况进行故障识别和报警。
3. 运行时受电弓夹入异物。船艏结构悬挂异物识别与报警,支撑架异物识别与提示。
4、受电弓运行过程中产生大火花,且火花发生在工作区域时,需要智能分析功能,有效识别大火花并报警,避免二次事故。运行过程中产生的微小火花未识别,因不属于重大危害,暂时报警。
5. 受电弓CCTV系统摄像头有少量污垢,在需要智能分析时,摄像头捕捉到的船头结构有一小部分,可以分块识别,不受外物干扰。
4. 受电弓结构异常识别
4.1 受电弓结构变形报警
受电弓闭路电视系统摄像头有少量污垢,在需要进行智能分析时,摄像头会捕捉到一小部分位于船首结构的污垢,以便在不受外物干扰的情况下进行分块和识别。

受电弓正常状态图片
车辆受电弓在运行一段时间后,受到异物冲击而发生结构变形;需要通过受电弓视频监控系统有效识别此类故障并报警;识别图片如下所示。

受电弓结构故障图片
4.2 受电弓倾斜报警
受电弓在运行过程中会出现倾斜故障,需要及时引起机械师的注意,以便判断和采取行动。但是,受电弓的结构和安装在不同型号上的受电弓摄像机的位置不同,因此受电弓倾斜角度的决定也不同。结合受电弓倾斜的相关视频,需要给出报警的倾斜角度。

受电弓倾斜角度图片的智能识别
4.3 受电弓角度断线报警
受电弓断角有两种情况,一种是断角悬空不脱落,一种是断角脱落。这两种情况都需要测试弓的完整性并在受电弓形式不完整时向监控屏幕发送警报信号。不同之处在于两种情况下都需要权衡阈值设置以降低错过警报的比率。它还需要结合视频测试来定义3秒内超过40帧的图像是一个将发送警报条件的故障。

受电弓下降过程图片
(1)弓角骨折未分离
受电弓角度断裂且未脱离故障时的情况如下图所示。

弓断角未脱落受电弓图片
对此类情况的智能分析需要正确识别故障和警报,并在不丢失视频检测的情况下对破损进行实际测试。
(2)弓角完全折断
当受电弓拱角发生完全断裂时,需要识别这种类型的受电弓故障,如下所示。

智能识别完全受电弓角度破损
对此类情况的智能分析需要正确识别故障和警报,并在不丢失视频检测的情况下对破损进行实际测试。
4.4 受电弓异物侵入报警
受电弓智能分析主机在识别受电弓异物侵入故障时,综合考虑了各种因素造成的误报。从入侵结果分析目前只能识别长期悬在船头的异物入侵故障。
(1)受电弓体
对于异物侵入受电弓弓部,需要识别是否有异物侵入,如下图所示,这需要明显检测到受电弓悬挂的塑料袋中有异物的“Fuxing” D1702。

智能识别受电弓体悬挂异物
4.5 受电弓火花报警器
目前,由于微小的受电弓火花对车辆安全的影响较小,因此不对其进行识别分析。
受电弓火花的受电弓智能分析仅识别明显的火花故障(火花区>受电弓头部区域的一半;该指标可以修改配置)。判断火花在碳撬的工作区域(x1到x2,如下图),避免误报。
大受电弓火花智能识别报警结果如下图大火花智能识别报警。

火花发生区域的坐标图像

受电弓大火花智能识别报警结果图片
5.智能受电弓故障识别和特定工况报警
在开启受电弓视频监控系统智能分析功能时,特殊工况会对智能分析功能产生较大影响,导致漏报和误报。需要以下特殊条件。
5.1 隧道模式报警
在进出隧道和在隧道内奔跑的过程中,摄像头的曝光和隧道内环境的影响都会影响智能分析功能,具体如下。
进出隧道时,需要设计算法识别出入隧道模式,过滤出进出隧道入口过程的误曝光报警。下图显示需要过滤掉曝光图像,并且没有发出警告。

进入隧道瞬间曝光图片
在隧道内,需要识别当前环境是否适合检测,即受电弓视频监控画面是否模糊。若因补光强度不足或补光故障导致画面模糊,则智能识别检测功能关闭。如果没有混淆,则激活检测,如图所示系统一般在隧道中运行。此外,建议将补光灯反射造成的误报场景纳入不适合检测的类别,并关闭报警功能,如图所示隧道补光灯反射造成的船首模糊。

系统在隧道中运行的图片

隧道内补光反射造成的弓形模糊图像
5.2 后台模式报警
(1)桥梁、供电设备等背景因素
桥梁、供电设备等背景因素造成的干扰,是智能分析时偶尔会被检测为异常的少数帧。当异常大于一定帧数时触发报警,有效滤除虚假图像。具体算法需要结合车速设置,统计汽车以不同速率通过背景物体所消耗的时间(即帧数),并优化阈值以最终排除此类干扰。
例如,通过分析下图所示的背景栏杆,发现火车通过上述背景设施时,总共占用了大约 4 帧。4帧后受电弓检测结果正常,所以针对这种栏杆背景设置。1秒内可设置20帧以上正常识别不报警。

背景图案干涉图
(2)火车站的背景因素
对于列车停靠站,需要将速度阈值设置为0,即速度为0时关闭智能识别功能。列车停靠站的受电弓视频监控画面如下图所示。左边的图像显示了背景干扰,这将导致误报。右图中,如果列车停止产生重叠后,受电弓停在图像后面的栏杆上,就会产生误报,所以在关闭智能分析功能时,将速度设置为0,就可以过滤掉这样的情况。干涉。

火车站受电弓的视频监控图像
(3)火车进入环境因素
在列车行驶过程中,智能分析功能可能会因车站背景的变化而受到误报的影响。由于处于低速状态,受电弓异常对车辆运行安全的影响较小,低速状态引起受电弓结构异常问题的可能性较小。必须设置一定的速度阈值,以保护站点免受虚假干扰警报的影响。受电弓视频监控智能分析功能在特定运行速度以下关闭。根据车辆进出站限速,暂定低于40公里/小时,限速可根据应用分析调整,尽量减少误报问题的发生。
5.3 脏模式报警
脏模式影响受电弓闭路电视系统摄像头的清晰度,进而影响智能识别功能的报警。智能分析可以直接关闭,以减少对具有重大影响的脏污渍的误报,例如沙子、灰尘、大雨或雪。对于影响较小的污垢,例如小污点,需要减少误报。
脏污影响的判断可以通过识别视频画面是否模糊来实现。

受电弓视频图像清晰度对比图
需要识别脏入侵量进行判断。
例如,如下图所示,如果将智能分析设置为在雨水入侵超过 30% 时关闭。下图并未将受电弓整体识别,即雨水污染对受电弓面积的侵占超过30%。判断雨过大,关闭智能分析。如果雨水污物侵入受电弓区域小于某个阈值,智能识别功能不关闭。

大雨条件下的受电弓视频监控图像
对于脏污轻微的情况,视频图像被识别为边缘脏污,不影响弓的整体结构;因此,不会发出警报,如下图所示。

受脏边影响的受电弓视频监控图片
对于较轻微的脏情况,镜头的脏区域主要是固定的。
6.客户
当智能分析功能检测到受电弓异常时,受电弓视频监控界面界面直接弹出报警框,其中包含受电弓故障类型和故障图片。同时,您可以点击"相关视频"按钮,调用并播放故障图片所在的 2 分钟视频(故障报警图片前 1 分钟和后 1 分钟),如下图所示。

受电弓监控屏故障视频报警图片